First Week Update + what I learned : This week in robotics class for the robotics team we started to design and build the robot for the competition. We also started a team website for the competition. The robot we started to build will have a triangular chassis that will make it easier to distribute the weight and climb the mountain.
This week I learned how to build and design a better robot. I also learned how to wire and connect the electrical components to the robot. I also learned about using phones for controlling the robot and the apps needed to use the controllers for the robot.
10/5/15:
Today We built more of the robot and and started the design how to add the motors and wheels. We also continued to work on the chassis of the robot, we added more places to attach the electrical components. I learned how to use different motors and what they were used for.
10/6/16:
Today we worked on the robot more and started to attach the motors. The program for the movement is still not working.
10/8/15
Today we finished putting the motors on the robot. We also attached the circuit boards to the robot. The program is finally working and we got the robot to move in circles but still will not go straight.
10/9/15:
The robot can now move forward and even stop. It can not move backwards or turn effectively yet.
10/13/15:
Today we worked on the robot so that it can turn and move backwards. We also started a design of how to move the objects on the ground to score points. The first design to move the objects is v shaped to push the objects.
10/23/15:
Today we designed and attached the plow to move the objects on the ground. We also fixed the wheels and made the robot move faster. We created a maze for the robot to test and improve our skills at driving the robot.
10/26/15:
Today We worked on the ball launcher and started to make a flag.
10/29/15:
Today we finished the ball launcher and started to design a holder to put it on. We worked on a claw to pick up the ball for the launcher. We also finished the team flag and started working on the team shirts.
11/5/15:
today we realized that we lost the sensors and will not be able to compete during the first 30 seconds of the match.
11/9/15:
today we looked for the sensors online but could not find them. We also found a ramp from the competition to build and practice on.
11/10/15:
Today we worked on the claw of the robot, we also modified the ball launcher so it will not get stuck while we are using it. Today we also started the engineering note book.
-
-
-
-
12/15/15: Today we learned how to control the robot better we also improved the robot by adding a phone holder.\
Questions:
1) Today I will try and get better/learn more about programming the robot.
2) The criteria for good work or mastery are knowing how to program the robot without having mistakes in the code.
NXT Light sensor robot
EV3 Light sensor robot
writing sample
- Take the black lego and put the green lego in the middle so that the are three conection points on each side of the green lego
- connect the gray lego on top of the green lego
- then connect the red lego to the grey lego
- then connect the blue lego to the red lego
- for the last step connect the yellow lego to the blue lego
- when you are finished the legos should be stacked one on top of the other and the color order should be black, green, grey, red, blue, yellow.
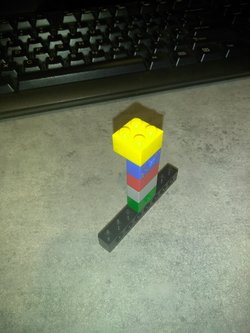
correct design
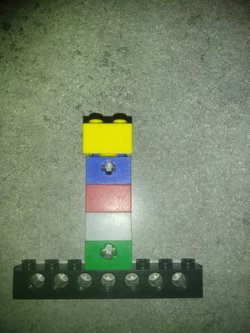
Kegans attempt at building
