Engineer design process
Step 1)Build a robot that is your own special design. You can look up ideas online but not an exact copy. Our robot will start to inch across the floor when hearing a sound until, an object rolls in front of it.
Step 2) Site one: http://nxtprograms.com/inch_worm/index.html
Site two: https://www.youtube.com/watch?v=OyijN9HUckQ
Site three: https://www.youtube.com/watch?v=7htPnC2EGEs
What we learned: The youtube sites showed us how the nxt inch worm moved and the other site we used to have an idea of the design and how to build it.
Step 3) A) We based it off the design page.
B) Put a sound and ultra sonic sensor on where the front of the robot will be.
C) Put two motors on the robot instead of one.
Step 4) We have to program this bot to move together and apart and put in use the sound and ultra sonic sensor added.
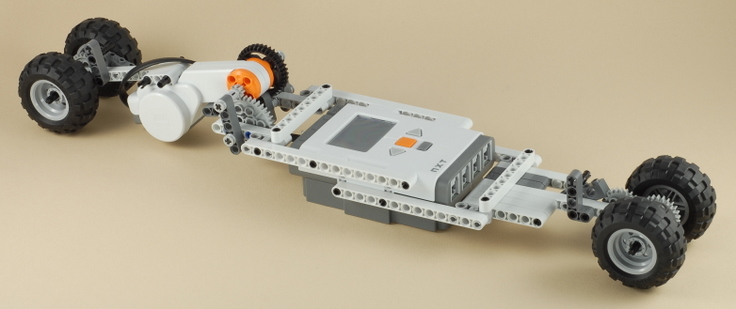
Step 5) We forgot to take a picture of the robot so, this is the design we based it off of.
Step 1)Build a robot that is your own special design. You can look up ideas online but not an exact copy. Our robot will start to inch across the floor when hearing a sound until, an object rolls in front of it.
Step 2) Site one: http://nxtprograms.com/inch_worm/index.html
Site two: https://www.youtube.com/watch?v=OyijN9HUckQ
Site three: https://www.youtube.com/watch?v=7htPnC2EGEs
What we learned: The youtube sites showed us how the nxt inch worm moved and the other site we used to have an idea of the design and how to build it.
Step 3) A) We based it off the design page.
B) Put a sound and ultra sonic sensor on where the front of the robot will be.
C) Put two motors on the robot instead of one.
Step 4) We have to program this bot to move together and apart and put in use the sound and ultra sonic sensor added.
Step 5) We forgot to take a picture of the robot so, this is the design we based it off of.
Step 6 ) A) At first the robot didn't work the program didn't respond properly.
B) No we had to replace the ultra sonic sensor because it wouldn't respond.
C) We replaced the ultra sonic sensor for a touch sensor.
D) It was a free build but compared to the original design we added a motor.
E) Yes it is perfectly safe.
F)
B) No we had to replace the ultra sonic sensor because it wouldn't respond.
C) We replaced the ultra sonic sensor for a touch sensor.
D) It was a free build but compared to the original design we added a motor.
E) Yes it is perfectly safe.
F)

step 8) If i could change the robot i would have changed the design so that it would be easier to program
